La scienza dei microrobot sta vivendo sviluppi che potrebbero trasformare la medicina e l’ingegneria. I ricercatori sudcoreani hanno sviluppato sciami di minuscoli robot magnetici che possono cooperare per svolgere compiti impressionanti, dalla navigazione in ambienti complessi alla fornitura di assistenza medica. Ecco come queste innovazioni potrebbero ridefinire il nostro approccio alle sfide tecniche e biologiche.
Gli scienziati dell'Università Hanyang di Seul hanno sviluppato con successo sciami di microrobot magnetici, ispirati al comportamento collettivo delle formiche. Il loro lavoro, pubblicato il 18 dicembre sulla rivista Dispositivomostra che questi sciami possono svolgere compiti complessi sotto l'influenza di un campo magnetico rotante. Questi microrobot, anche se piccoli, mostrano a adattabilità e uno autonomia notevole.
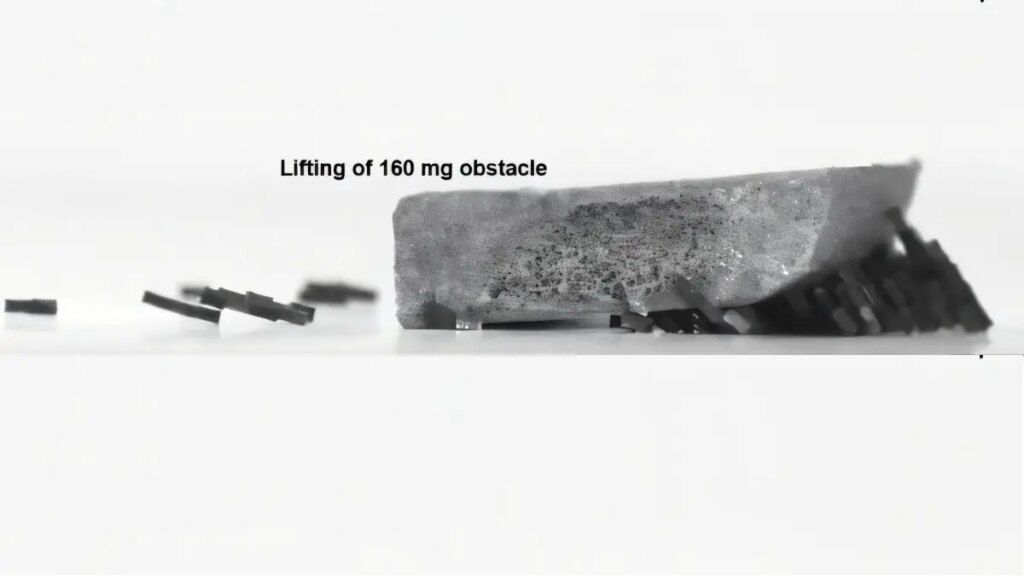
Gli sciami di microrobot sono stati testati per le loro prestazioni in varie configurazioni di assemblaggio. Hanno dimostrato la capacità di superare ostacoli cinque volte più alti della loro altezza individuale e di lanciarsi collettivamente oltre queste barriere. Inoltre, uno sciame di 1.000 microrobot ha formato una zattera galleggiante sull’acqua, avvolgendo una pillola che pesa 2.000 volte più di un singolo robot, consentendo il trasporto del farmaco attraverso il liquido.
Sulla terraferma, uno sciame trasportava un carico 350 volte più pesante di ciascun microrobot. Hanno anche sbloccato con successo i tubi imitando i vasi sanguigni bloccati, dimostrando potenzialmente la loro utilità in applicazioni mediche come il trattamento dei vasi sanguigni trombosi.
Lo studio di Jeong Jae Wie e colleghi ha rivelato aspetti affascinanti della robotica degli sciami. “I ricercatori sono rimasti sorpresi dall’elevata adattabilità degli sciami di microrobot al loro ambiente e dal loro elevato livello di autonomia nel controllo dello sciame,» dichiarò. Questa ricerca evidenzia come gli sciami non solo possono svolgere compiti ma anche adattarsi dinamicamente alle mutevoli condizioni.
Gli sciami di robot cubici, anziché sferici, offrono vantaggi rispetto ai contatti punto a punto attraverso superfici di contatto più grandi, aumentando così la forza di attrazione magnetica tra di loro. Ogni microrobot, con un'altezza di 600 micrometri, è composto da un corpo epossidico che incorpora particelle di NdFeB, consentendo una reazione ai campi magnetici.
Nonostante la loro abilità, gli attuali microrobot richiedono ancora un controllo magnetico esterno, limitando la loro autonomia in spazi complessi come le arterie umane. Wie sottolinea che “sciami di microrobot magnetici richiedono un controllo magnetico esterno e non hanno la capacità di navigare autonomamente in spazi ristretti o complessi come le arterie vere e proprie.» Il futuro di questa ricerca si concentrerà sul miglioramento dell'autonomia, con l'obiettivo del controllo in tempo reale dei movimenti e delle traiettorie.
Didascalia dell'illustrazione: Robot che si muovono sollevando e guidando oggetti. Credito: Dispositivo/Yang e Won et al.
Articolo: Intelligenza dello sciame magnetico di assiemi di microrobot programmabili prodotti in serie per l'esecuzione di attività versatili, Dispositivo (2024). DOI: 10.1016/j.device.2024.100626.

